Where we fit
Construction tech for AEC teams.
Spatial AI SaaS that turns site captures into usable 3D evidence.
You're on the list! We'll be in touch.
Back homeSend us a message and we will get in touch
The Next Evolution in AI.
About SpatioSense
We combine Robotics PhDs, applied computer vision, and startup grit to remove the friction between site reality and project delivery.
SpatioSense is a spatial AI software platform for construction teams. We help owners, general contractors, and consultants capture job sites using smartphones and turn that data into 3D models, defect detection, and progress verification—reducing rework, site visits, and close-out time.
Trusted spatial AI for construction
SpatioSense turns quick smartphone captures into actionable, spatially-aware intelligence for owners, GCs, and consultants.
Walk the site once. Our capture guidance reduces reshoots and ensures coverage without specialized scanners.
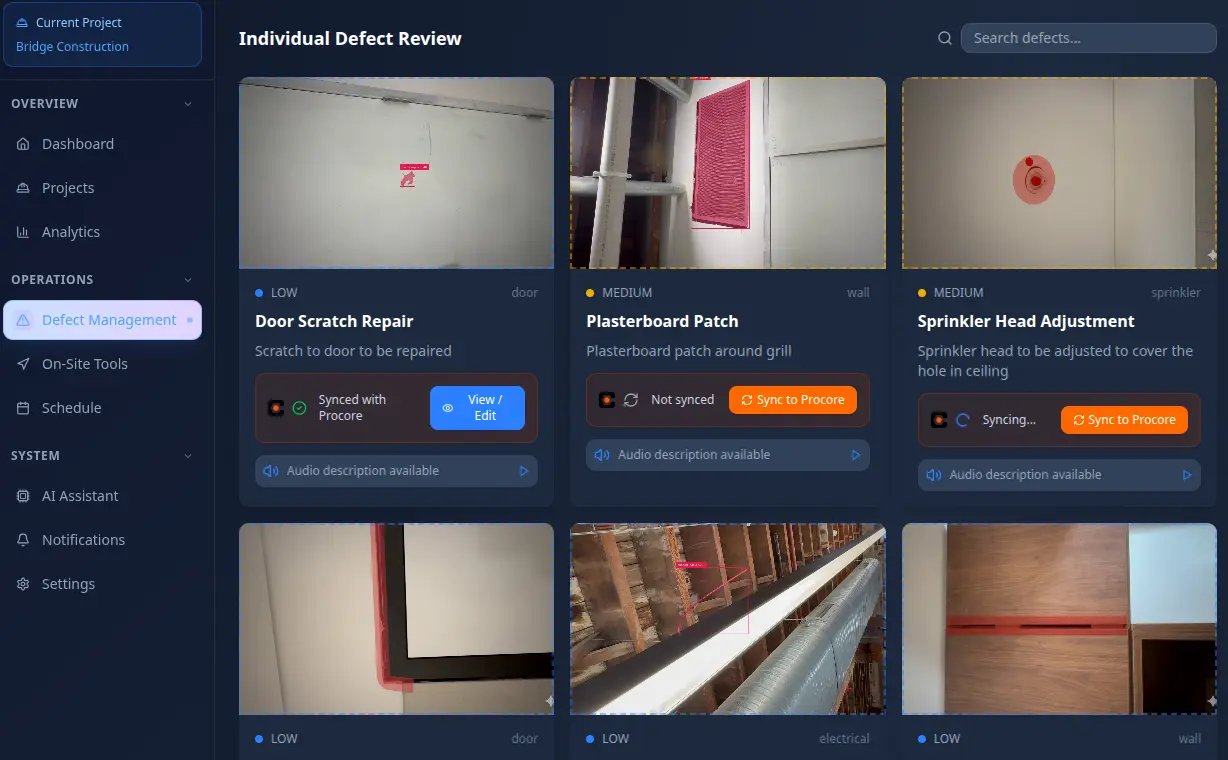
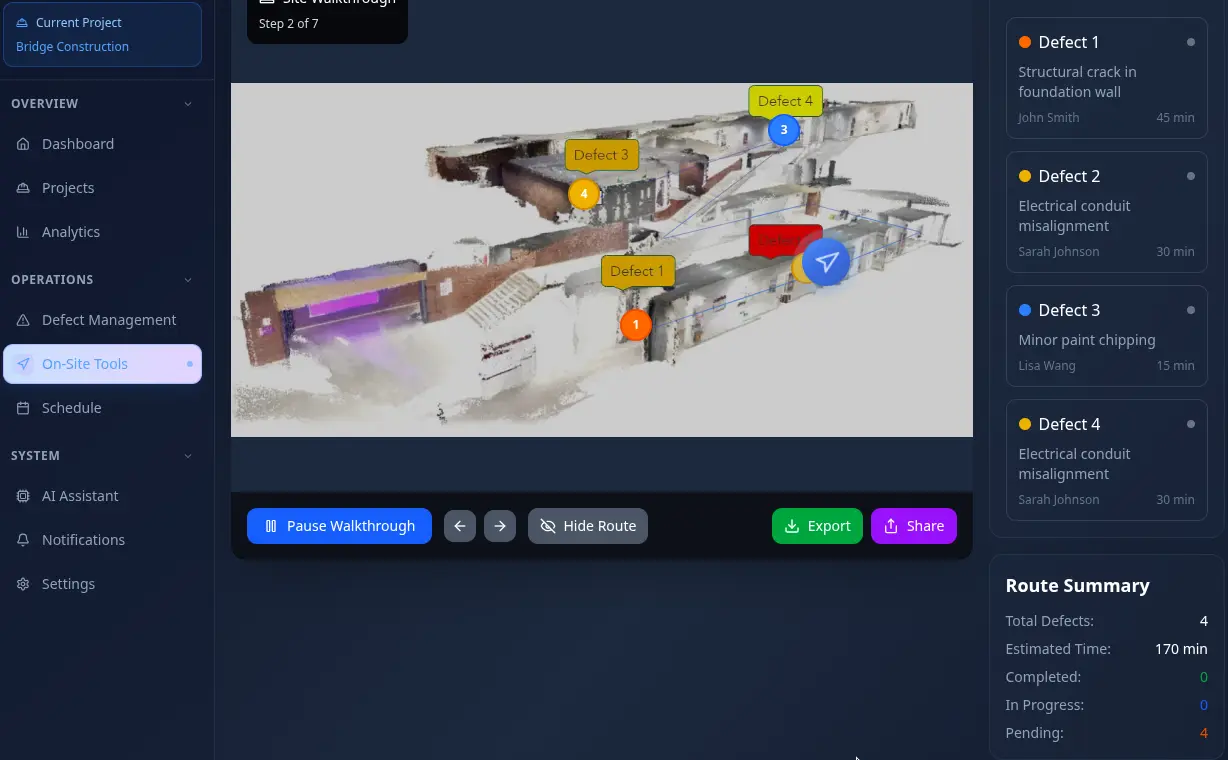
Automatically flag defects, code issues, and mismatches against plans. Each finding is pinned in 3D space.
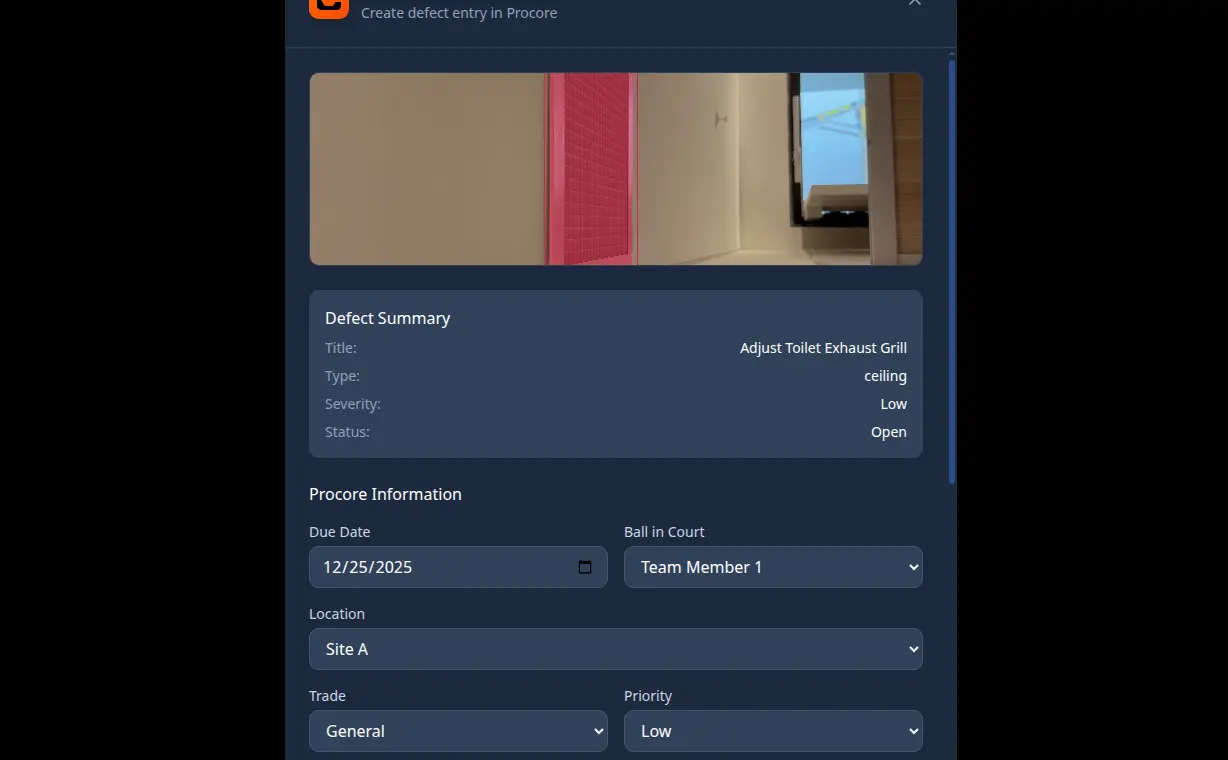
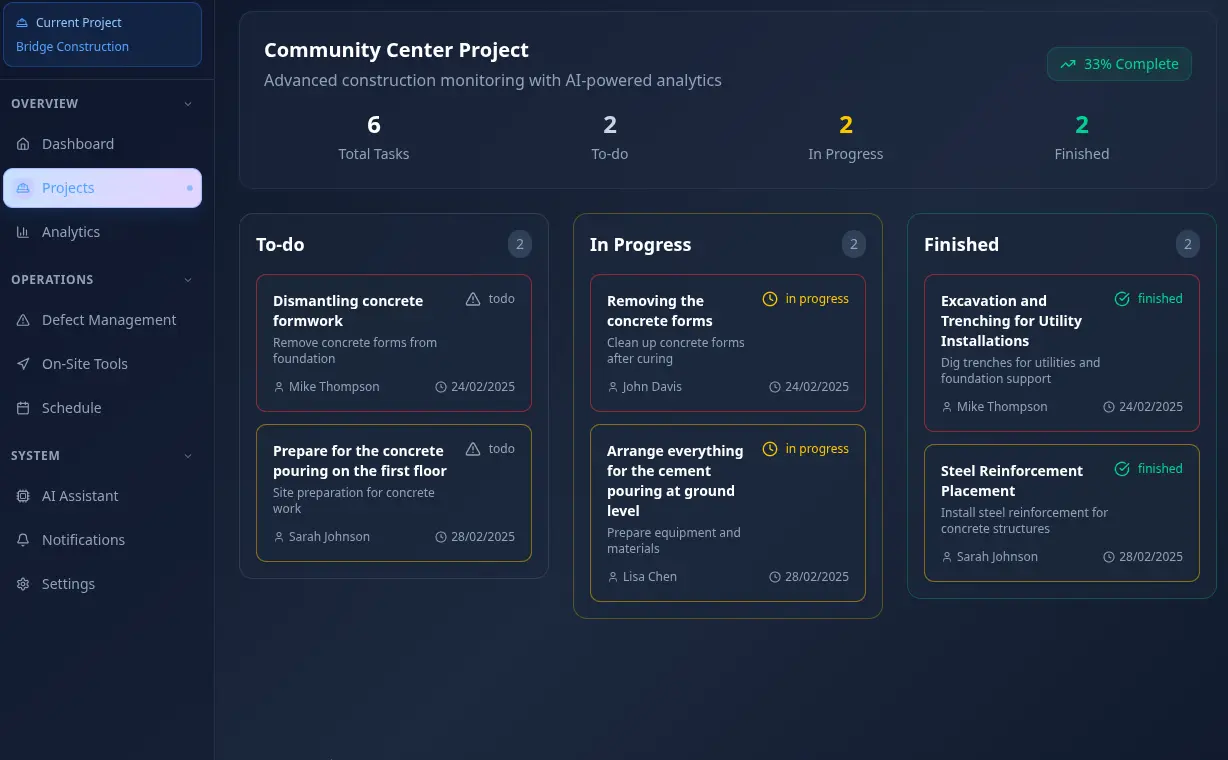
Generate close-out lists, sequence site visits, and push updates into Procore, BIM 360, or your preferred tools.
How it works
No lidar vans or week-long turnarounds. Just fast, high-fidelity spatial data that is ready to act.
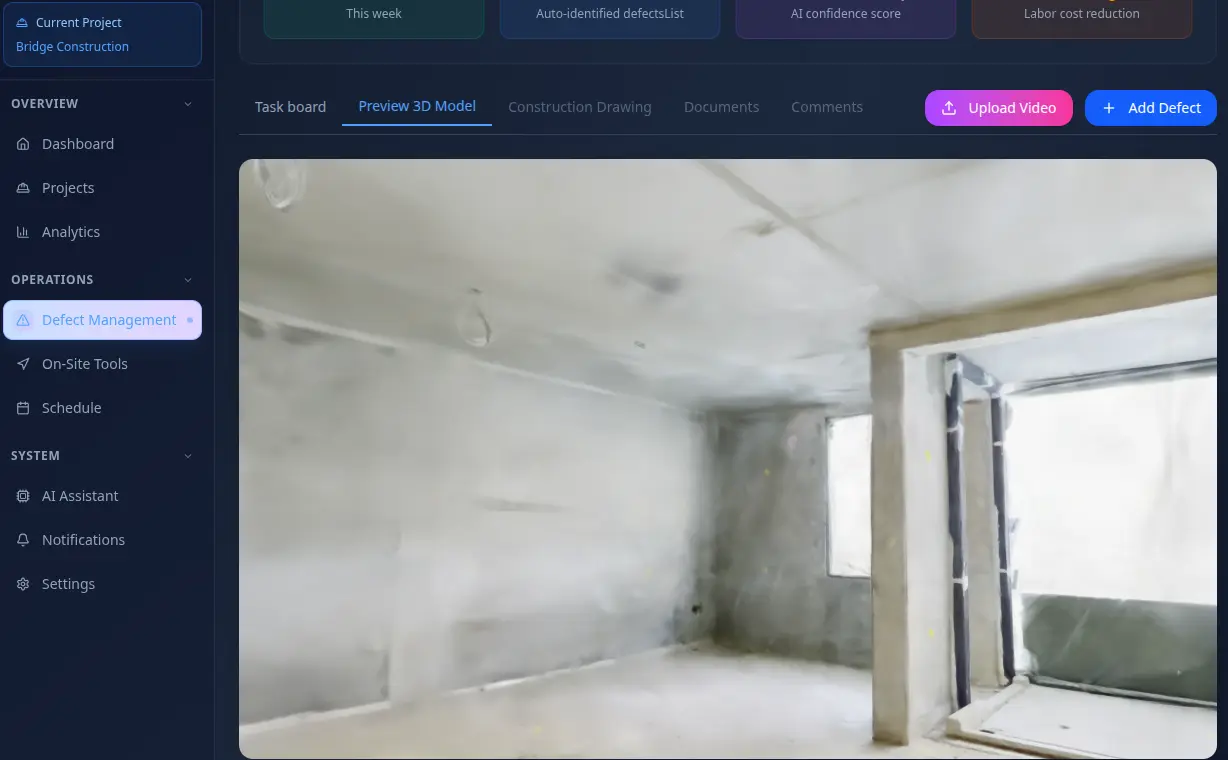
Record with your phone. Forget expensive laser scanners. Walk your site, upload to SpatioSense, and we handle the rest.
Our engine transforms video into a high-fidelity 3D map. AI scans the environment to detect, log, and spatially tag defects.
Track close-out progress, create site-visit plans, and view analytics. Data pushes directly into your construction stack.
Use case
A concise, plain-language snapshot for evaluators and decision makers.
Where we fit
Spatial AI SaaS that turns site captures into usable 3D evidence.
Who uses it
Teams that need fast, shared visibility across active job sites.
Why it matters
Replace slow QA/QC with actionable 3D proof tied to real issues.
Current stage
Onboarding new teams with guided demos and active projects.
Product video
A short walkthrough of the capture-to-resolution workflow.
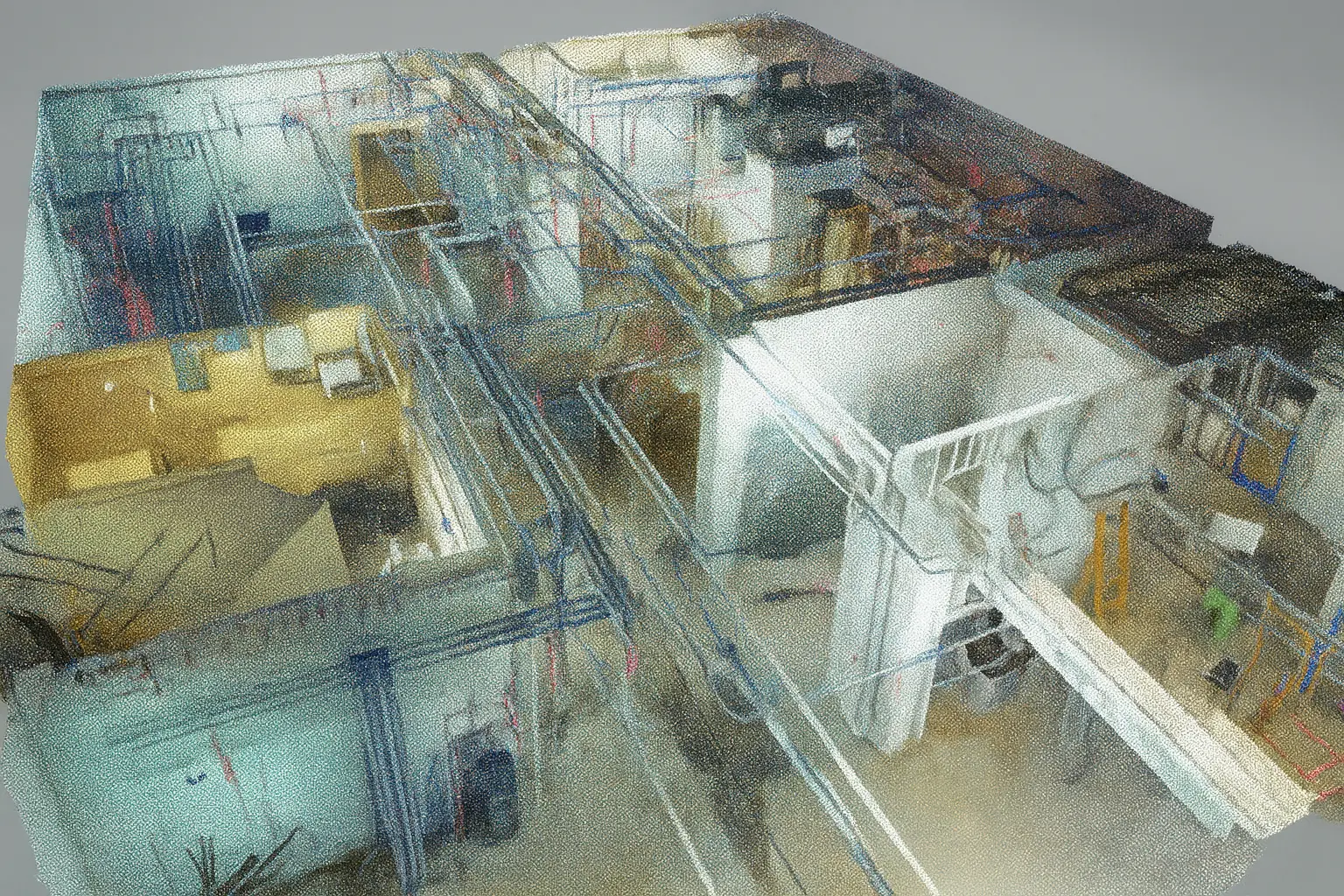
Reality-grade visuals
From exterior progress to interior finishes, our capture pipeline delivers spatially anchored visuals you can trust.


Platform depth
Photogrammetry tuned for dynamic job sites delivers dense meshes and point clouds with export options for BIM workflows.
Every observation is geo-anchored, timestamped, and linked to responsible parties for faster accountability.
Compare as-built scans to design intent, highlighting deviations before they become change orders.
Flag missing guards, blocked egress paths, and PPE gaps with automated checks tailored to your standards.
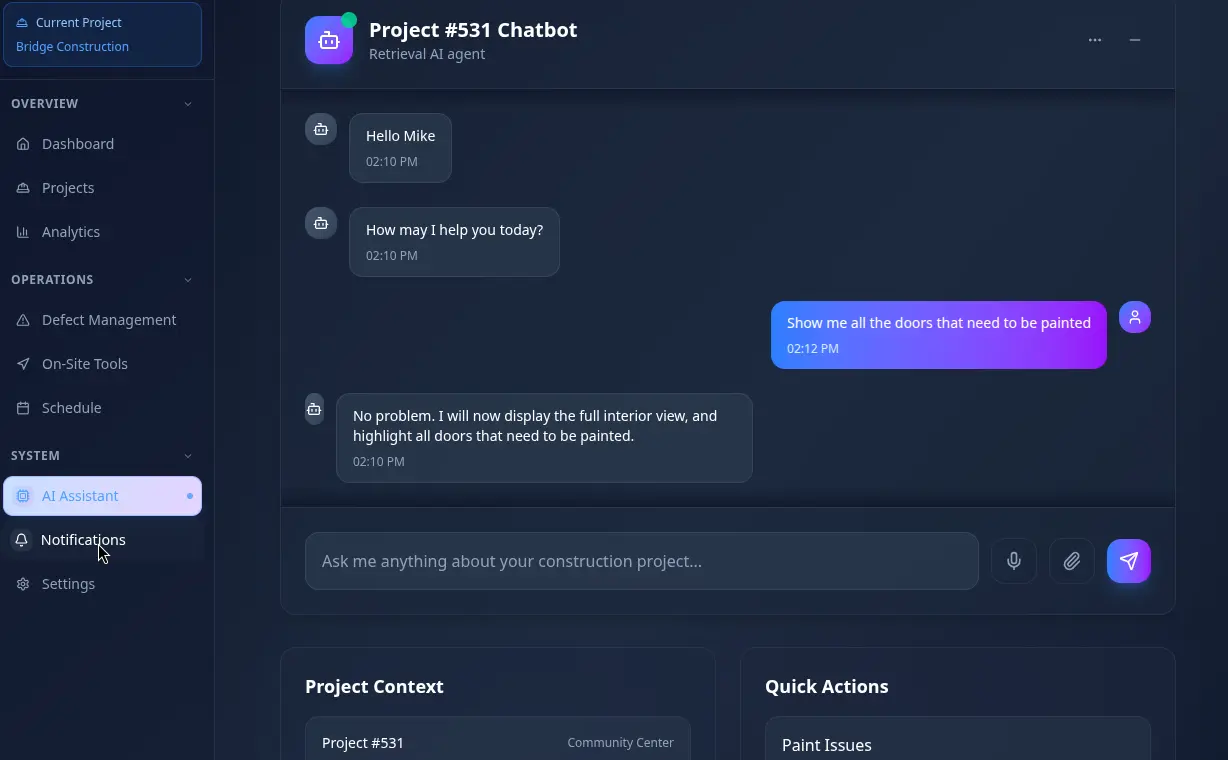
Share views, annotations, and assignments with subs and owners without forcing them into new software.
Push findings into Procore, Autodesk Construction Cloud, or CSV/Docx exports to keep documentation consistent.
Impact you can measure
Reduction in defect re-walks across pilot projects.
From capture to actionable, shareable 3D deliverables.
Faster close-out when paired with existing project tools.
Team
Robotics PhDs shipping field-ready spatial AI for construction teams.

Co-founder
Fred is a robotics expert with a passion for solving real-world
problems through visual intelligence. Holding a PhD in Robotics,
he has made significant research contributions to the fields of
active perception, planning and mapping.
Fred's
career is defined by bridging the gap between academia and
industry. Having played pivotal roles in high-growth startups,
he understands the challenge of deploying complex algorithms in
unstructured environments. At SpatioSense, he is continuing his
passion for translating bleeding-edge research into tangible
value for the construction industry.

Co-founder
Tin loves CS, ML, robotics, and everything in between. Over his research career, he's worked with international institutions on machine vision for search-and-rescue operation, contributed to defense projects like Autonomous Underwater Vehicles on sonar sensing for mine countermeasure, aerial flight under GPS-denied scenario, and served as CTO for an eVTOL company focusing on urban autonomous flight. At SpatioSense, he turns complex ideas into practical, scalable tech—all with a healthy sense of curiosity and fun.

Co-founder
Raphael Falque is a robotics and 3D perception expert focused on
enabling robust spatial understanding for real-world autonomous
systems. With a PhD in Robotics, his work centres on geometric
perception, point-cloud processing, and sensor fusion, tackling
challenges such as deformation, motion, and incomplete data in
unstructured environments.
Raphael specialises in
translating advanced perception research into systems that work
reliably outside controlled environments. His work emphasises
deployable 3D perception pipelines, combining geometric
reasoning and multi-sensor data, to support robust
decision-making in dynamic, real-world conditions. He brings a
practical mindset to complex perception challenges, ensuring
solutions are not only innovative but operational at scale.
Collectively, we bring decades of research in computer vision and AI plus experience shipping production software into active construction environments. We combine academic rigor with operator pragmatism to deliver spatial intelligence that works on real job sites.
See it live
Get a guided walkthrough or jump straight into the live demo.